Sama5d27Som1-EK
SoC Features
The SAMA5D2 series is a high-performance, ultra-low-power ARM Cortex-A5 processor based MPU. The Cortex A5 processor runs up to 500MHz and features the ARM NEON SIMD engine a 128kB L2 cache and a floating point unit. It supports multiple memories, including latest-generation technologies such as DDR3, LPDDR3, and QSPI Flash. It integrates powerful peripherals for connectivity (EMAC, USB, dual CAN, up to 10 UARTs, etc.) and user interface applications (TFT LCD controller, embedded capacitive touch controller, class D amplifier, audio PLL, CMOS sensor interface, etc.). The devices offer advanced security functions to protect customer code and secure external data transfers. These include ARM TrustZone, tamper detection, secure data storage, hardware encryption engines including private keys, on-the-fly decryption of code stored in external DDR or QSPI memory and a secure boot loader.

Kit Information
Kit Overview
The SAMA5D27 SOM1-EK documents can be found on microchip website, as following:

Access the console
The usual serial communication parameters are 115200 8-N-1 :
| Baud rate | 115200 |
| Data | 8 bits |
| Parity | None |
| Stop | 1 bit |
| Flow control | None |
Access the console on JLINK micro-A USB connector (J10)
The serial console can be accessed from the micro-A USB connector that gives access to the on-board serial-to-USB converter (marked as J10 JLINK). In fact, the ATSAM3U chip on the Evaluation Kit acts as a serial-to-USB converter and is loaded with a firmware that is able to talk USB-CDC protocol.
- For Microsoft Windows users: Install the J-Link CDC USB driver. No need to install a driver on any regular Linux distribution.
- Connect the USB cable to the board (J10 JLINK)
- For Microsoft Windows users: identify the USB connection that is established
JLINK CDC UART Port should appear in Device Manager. The COMxx number will be used to configure the terminal emulator.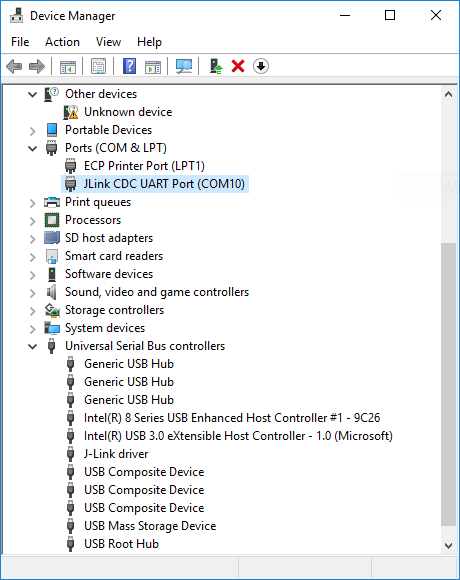
- For Linux users: identify the USB connection by monitoring the last lines of dmesg command. The /dev/ttyACMx number will be used to configure the terminal emulator:usb 1-1.2.2.4: new high-speed USB device number 33 using ehci-pci
usb 1-1.2.2.4: config 1 interface 1 altsetting 0 bulk endpoint 0x83 has invalid maxpacket 64
usb 1-1.2.2.4: config 1 interface 1 altsetting 0 bulk endpoint 0x4 has invalid maxpacket 64
usb 1-1.2.2.4: New USB device found, idVendor=1366, idProduct=0105
usb 1-1.2.2.4: New USB device strings: Mfr=1, Product=2, SerialNumber=3
usb 1-1.2.2.4: Product: J-Link
usb 1-1.2.2.4: Manufacturer: SEGGER
usb 1-1.2.2.4: SerialNumber: 000483029109
cdc_acm 1-1.2.2.4:1.0: ttyACM0: USB ACM device
- For Microsoft Windows users: identify the USB connection that is established
- Now open your favorite terminal emulator with appropriate settings
Demo
Demo archives
| Media type | Board | Features | Binary | Description |
|---|---|---|---|---|
| Yocto Project / Poky based demo | ||||
| SD Card image | SAMA5D27 SOM1 EK | Headless | linux4microchip-oecore-sama5d27_som1_ek-headless-2025.10.img.bz2 (~ 137 MB) md5: 7ccb6cf522550c987a8544c0c9715a82 | Linux4SAM Yocto Project / Poky based demo compiled from tag linux4microchip-2025.10 Follow procedure: #Create_a_SD_card_with_the_demo |
| Graphics | linux4microchip-oecore-sama5d27_som1_ek-graphics-2025.10.img.bz2 (~ 237 MB) md5: d6dbdd1f1081950d13a22858bf94f1c1 | |||
| OP-TEE Graphics | linux4microchip-oecore-sama5d27_som1_ek-optee-graphics-2025.10.img.bz2 (~ 239 MB) md5: fdba28e1a926fc4c0d85acb0040fe5fe | |||
| OP-TEE Headless | linux4microchip-oecore-sama5d27_som1_ek-optee-headless-2025.10.img.bz2 (~ 139 MB) md5: 44c3e1d3c3398953a4c3cd17546effb5 | |||
| BuildRoot based demo | ||||
| SD Card image | SAMA5D27 SOM1 EK | Headless | linux4microchip-buildroot-sama5d27_som1_ek-headless-2025.10.img.bz2 (~ 86 MB) md5: 90dd29e8f91adb88b9d7c0c79f347a83 | Linux4SAM BuildRoot based demo compiled from tag linux4microchip-2025.10 Follow procedure: #Create_a_SD_card_with_the_demo |
| Graphics | linux4microchip-buildroot-sama5d27_som1_ek-graphics-2025.10.img.bz2 (~ 222 MB) md5: 3558e9a4a8167adca09cc9b167deb03a | |||
| OP-TEE | linux4microchip-buildroot-sama5d27_som1_ek-optee-graphics-2025.10.img.bz2 (~ 224 MB) md5: 551f8a3cd5e6a82d75d55643b9caa2aa | |||
| OP-TEE | linux4microchip-buildroot-sama5d27_som1_ek-optee-headless-2025.10.img.bz2 (~ 87 MB) md5: 8dff5f9bd020ebea69b1e8c79225863d | |||
You need a 1 GB (or larger) SD card and to download the image of the demo. The image is compressed to reduce the amount of data to download. This image contains:
- a FAT32 partition with the AT91Bootstrap, U-Boot and the Linux Kernel (zImage and dtb), and
- an EXT4 partition for the rootfs.
Multi-Platform Procedure
To write the compressed image on the SD card, you will have to download and install balenaEtcher. This open-source software tool is useful for obtaining a compressed image as input. Additional information and support can be found on the balenaEtcher website.
Insert your SD card and launch Etcher:
Select the demo image.
Select the device corresponding to your SD card (Etcher suggests the devices that are removable to avoid erasing your system disk).
Click on the Flash! button.
On Linux, Etcher finally asks you to enter your root password because it needs access to the hardware (your SD card reader or USB to SD card converter).
Then the flashing process begins followed by a verification phase (optional).

Once writing is done, Etcher asks you if you want to burn another demo image:

Build From source code
Setup ARM Cross Compiler
Download the Arm GNU toolchain:
Add the Arm GNU toolchain to your system:
export CROSS_COMPILE=`pwd`/arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-
or
export CROSS_COMPILE=arm-none-linux-gnueabihf-
export PATH=$PATH:/YOUR/PATH/TO/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-linux-gnueabihf/bin/
If you already have an old Arm GNU toolchain, you need to clean up the PATH with:
Build AT91Bootstrap from sources
This section describes how to get source code from the git repository, how to configure with the default configuration, how to customize AT91Bootstrap based on the default configuration and finally to build AT91Bootstrap to produce the binary. take the default configuration to download U-Boot from NandFlash for example.
Get AT91Bootstrap Source Code
You can easily download AT91Bootstrap source code on the at91bootstrap git repository.
To get the source code, you should clone the repository by doing:
Cloning into 'at91bootstrap'...
remote: Enumerating objects: 17621, done.
remote: Counting objects: 100% (3324/3324), done.
remote: Compressing objects: 100% (1029/1029), done.
remote: Total 17621 (delta 2465), reused 3102 (delta 2285), pack-reused 14297
Receiving objects: 100% (17621/17621), 5.65 MiB | 4.65 MiB/s, done.
Resolving deltas: 100% (13459/13459), done.
$ cd at91bootstrap/
Configure AT91Bootstrap
Assuming you are at the AT91Bootstrap root directory, you will find a configs folder which contains several default configuration files:
sama5d27_som1_eksd_uboot_defconfig
You can configure AT91Bootstrap to load U-Boot binary from SD Card by doing:
$ make sama5d27_som1_eksd_uboot_defconfig
If the configuring process is successful, the .config file can be found at AT91Bootstrap root directory.
Customize AT91Bootstrap
If the default configuration doesn't meet your need, after configuring with the default configuration, you can customize it by doing:
Now, in the menuconfig dialog, you can easily add or remove some features to/from AT91Bootstrap as the same way as kernel configuration.
Move to <Exit> with arrows and press this button hitting the Enter key to exit from this screen.
Build AT91Bootstrap
Then you can build the AT91Bootstrap binary by doing:
If the building process is successful, the final .bin image is build/binaries/at91bootstrap.bin.
Build U-Boot from sources
Getting U-Boot sources
Dedicated page on U-Boot wiki: http://www.denx.de/wiki/U-Boot/SourceCode
You can easily download U-Boot source code from Linux4Microchip GitHub U-Boot repository:
- clone the Linux4microchip GitHub U-Boot repository$ git clone https://github.com/linux4microchip/u-boot-mchp.git
Cloning into 'u-boot-mchp'...
remote: Enumerating objects: 951876, done.
remote: Counting objects: 100% (17718/17718), done.
remote: Compressing objects: 100% (5735/5735), done.
remote: Total 951876 (delta 12391), reused 15314 (delta 11846), pack-reused 934158
Receiving objects: 100% (951876/951876), 164.77 MiB | 401.00 KiB/s, done.
Resolving deltas: 100% (790362/790362), done.
$ cd u-boot-mchp/
- The source code has been taken from the master branch which is pointing to the latest branch we use. If you want to use the other branch, you can list them and use one of them by doing:$ git branch -r
origin/HEAD -> origin/master
origin/dev/tony/sama7g5ek_optee
origin/master
origin/sam9x60_curiosity_early
origin/sam9x60_early
origin/sam9x60_iar
origin/sam9x7_early
origin/sama5d27wlsom1ek_ear
origin/sama7g5_early
origin/u-boot-2012.10-at91
origin/u-boot-2013.07-at91
origin/u-boot-2014.07-at91
origin/u-boot-2015.01-at91
origin/u-boot-2016.01-at91
origin/u-boot-2016.03-at91
origin/u-boot-2017.03-at91
origin/u-boot-2018.07-at91
origin/u-boot-2019.04-at91
origin/u-boot-2020.01-at91
origin/u-boot-2021.04-at91
origin/u-boot-2022.01-at91
origin/u-boot-2023.07-mchp
origin/u-boot-2024.07-mchp
origin/uboot_5series_1.x
$ git checkout origin/u-boot-2024.07-mchp -b u-boot-2024.07-mchp
Branch 'u-boot-2024.07-mchp' set up to track remote branch 'u-boot-2024.07-mchp' from 'origin'.
Switched to a new branch 'u-boot-2024.07-mchp'
Cross-compiling U-Boot
Before compiling the U-Boot, you need setup cross compile toolchain in the section.
Once the AT91 U-Boot sources available, cross-compile U-Boot is made in two steps: configuration and compiling. Check the Configuration chapter in U-Boot reference manual.
The U-Boot environment variables can be stored in different media, above config files can specify where to store the U-Boot environment.
sama5d27_som1_ek_qspiflash_defconfig
# To put environment variables in SD/MMC card:
sama5d27_som1_ek_mmc_defconfig
Here are the building steps for the SAMA5D27-SOM1-EK board:
make sama5d27_som1_ek_mmc_defconfig
make
The result of these operations is a fresh U-Boot binary called u-boot.bin corresponding to the binary ELF file u-boot.
- u-boot.bin is the file you should store on the board
- u-boot is the ELF format binary file you may use to debug U-Boot through a JTag link for instance.
Build Kernel from sources
Required packages
You must install essential host packages on your build host. These requirements are listed in the Linux kernel documentation with the chapter Install build requirements. You must follow this process which includes, but not limited to, the following packages:
- build-essential
- flex
- bison
- git
- perl-base
- libssl-dev
- libncurses5-dev
- libncursesw5-dev
- ncurses-dev
Getting Kernel sources
To get the source code, you have to clone the repository:
Cloning into 'linux'...
remote: Enumerating objects: 8587836, done.
remote: Total 8587836 (delta 0), reused 0 (delta 0), pack-reused 8587836
Receiving objects: 100% (8587836/8587836), 3.49 GiB | 13.44 MiB/s, done.
Resolving deltas: 100% (7117887/7117887), done.
Updating files: 100% (70687/70687), done.
$ cd linux
The source code has been taken from the master branch which is pointing on the latest branch we use.
$ git remote update linux4microchip
Fetching linux4microchip
From https://github.com/linux4microchip/linux
* [new branch] linux-6.6-mchp -> linux4microchip/linux-6.6-mchp
* [new branch] linux-6.12-mchp -> linux4microchip/linux-6.12-mchp
* [new branch] master -> linux4microchip/master
If you want to use another branch, you can list them and use one of them by doing this:
linux4microchip/linux-6.1-mchp
linux4microchip/linux-6.1-mchp+fpga
linux4microchip/linux-6.6-mchp
linux4microchip/linux-6.6-mchp+fpga
linux4microchip/linux-6.12-mchp
linux4microchip/master
$ git checkout -b linux-6.12-mchp --track remotes/linux4microchip/linux-6.12-mchp
Branch linux-6.12-mchp set up to track remote branch linux-6.12-mchp from linux4microchip.
Switched to a new branch 'linux-6.12-mchp'
Setup ARM Cross Compiler
First step is to dowload the ARM GNU Toolchain:
wget -c https://developer.arm.com/-/media/Files/downloads/gnu/13.2.rel1/binrel/arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-linux-gnueabihf.tar.xz
Next step is to add the ARM GNU Toolchain into your system:
tar -xf arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-linux-gnueabihf.tar.xz
export CROSS_COMPILE=`pwd`/arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-or
tar -xf arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-linux-gnueabihf.tar.xz
export CROSS_COMPILE=arm-none-linux-gnueabihf-
export PATH=$PATH:/YOUR/PATH/TO/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-linux-gnueabihf/bin/- export PATH=${PATH/':/YOUR/PATH/TO/arm-gnu-toolchain-VERSION-x86_64-arm-none-linux-gnueabihf/bin/'/}
Configure and Build the Linux kernel
Now you have to configure the Linux kernel according to your hardware. We have two default configuration at91 SoC in arch/arm/configs
arch/arm/configs/at91_dt_defconfig
arch/arm/configs/sama5_defconfig
arch/arm/configs/sama7_defconfig- at91_dt_defconfig: for SAM9 (ARM926) series chips
- sama5_defconfig: for SAMA5 series chips
- sama7_defconfig: for SAMA7 series chips
Now we Configure and Build kernel for sama5d27som1ek board:
HOSTCC scripts/basic/fixdep
HOSTCC scripts/kconfig/conf.o
SHIPPED scripts/kconfig/zconf.tab.c
SHIPPED scripts/kconfig/zconf.lex.c
SHIPPED scripts/kconfig/zconf.hash.c
HOSTCC scripts/kconfig/zconf.tab.o
HOSTLD scripts/kconfig/conf
#
# configuration written to .config
#
You can add or remove some features in the menuconfig dialog. Once done, use the arrows to navigate to <Exit> and press this button with the Enter key to exit from this screen.
Build the Linux kernel image, but before you build, you need to set up the cross compile toolchain. Check the "Set Up Arm Cross Compiler" section.
[..]
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
Now you have a usable compressed kernel image zImage.
If you need a uImage, you can run this additional step:
[..]
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
UIMAGE arch/arm/boot/uImage
Image Name: Linux-6.12.22-linux4microchip-20
Created: Thu May 22 18:05:21 2025
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 5688984 Bytes = 5555.65 KiB = 5.43 MiB
Load Address: 20008000
Entry Point: 20008000
Kernel: arch/arm/boot/uImage is ready
[..]
DTC arch/arm/boot/dts/microchip/at91-sama5d27_som1_ek.dtb
DTC arch/arm/boot/dts/microchip/at91-sama5d27_wlsom1_ek.dtb
DTC arch/arm/boot/dts/microchip/at91-sama5d29_curiosity.dtb
DTC arch/arm/boot/dts/microchip/at91-sama5d2_icp.dtb
DTC arch/arm/boot/dts/microchip/at91-sama5d3_eds.dtb
DTC arch/arm/boot/dts/microchip/at91-sama7d65_curiosity.dtb
DTC arch/arm/boot/dts/microchip/at91-sama7g54_curiosity.dtb
DTC arch/arm/boot/dts/microchip/at91-sama7g5ek.dtb
[..]
If the building process is successful, the final images can be found under the arch/arm/boot/ directory.
Build Yocto Project rootfs from sources
Support for the Microchip MPU SoC family is included in a particular Yocto Project™ layer, meta-mchp. The source for this layer is hosted on the Linux4Microchip GitHub® account on the Microchip Yocto Project BSP page.
Building Environment
A step-by-step, comprehensive installation is explained on the "Yocto Project Quick Build" page. The following lines should be considered as an add-on that is MPU-specific, or that can facilitate your setup.
Step-by-Step Build Procedure
OpenEmbedded™/Yocto Project BSP Layer for Microchip's SoCs
- Description
- The meta-mchp-common layer consolidates common Board Support Package (BSP) components and metadata for Microchip platforms, streamlining development across various Microchip devices for use with OpenEmbedded and/or Yocto Project.
- Supported Machines
- The meta-mchp-common layer provides support for various Microchip platforms. For detailed information about supported machines, please refer to the documentation in the relevant sub-layers:
- Prerequisites
- Before starting, please refer to the "Required Packages for Build Host" section in the Yocto Project documentation to install the required dependencies for the build environment:
For instance, on Ubuntu or Debian, these packages need to be installed on your development host:
build-essential chrpath socat cpio python3 python3-pip python3-pexpect \
xz-utils debianutils iputils-ping python3-git python3-jinja2 libegl1-mesa libsdl1.2-dev \
pylint3 xterm repo
Usage
- To integrate this layer into your Yocto Project build environment:
Clone the necessary repositories.
Create an empty directory to hold the workspace:
mkdir yocto-dev
cd yocto-devUse the repo tool to fetch all the required repositories.
repo init -u https://github.com/linux4microchip/meta-mchp-manifest.git -b <branch> -m <target>/default.xmlReplace and with the Yocto Project release branch and the manifest required. For example:
repo init -u https://github.com/linux4microchip/meta-mchp-manifest.git -b scarthgap -m mpu/default.xmlFetch all the required repositories using the following repo command:
repo syncInitialize the build environment.
The meta-mchp repository provides sample configuration templates that help set up BitBake™ layers and key configuration files in the Yocto Project build directory.
Set the TEMPLATECONF environment variable to point to the appropriate configuration template before initializing the build environment:
export TEMPLATECONF=${TEMPLATECONF:-../meta-mchp/<meta-layer>/conf/templates/default}Replace meta-layer above with the desired layer based on your target platform. For example:
export TEMPLATECONF=${TEMPLATECONF:-../meta-mchp/meta-mchp-mpu/meta-mchp-mpu-apps/conf/templates/default}Then initialize the Yocto Project build environment:
source openembedded-core/oe-init-build-envSet the target machine and build the image.
MACHINE=<machine> bitbake core-image-minimalEach sub-layer provides several images that include demos and applications tailored for its respective platform.
For more information on the supported images, please refer to the MPU layer README.
Layer Dependencies
This layer depends on the following layers:
- meta-openembedded
- URI: git://git.openembedded.org/meta-openembedded
- Layers: meta-oe, meta-networking, meta-python
- openembedded-core
- URI: git://git.openembedded.org/openembedded-core
- Layers: meta
For information on the specific revisions used, refer to the meta-mchp manifest repository.
- Licensing
- The contents of this layer are licensed under the MIT License. See COPYING.MIT for details.
- Contributing
- If you want to contribute changes, you can send GitHub pull requests.
Recent FAQ
- Unable to build gst1-at91-gstreamer plug-in in Buildroot
- Connect Module From PDA
- Console no longer receives characters
- Convert SAM-BA Scripts
- Crypto Hardware Acceleration
- Hash Error When Booting FIT Image
- Image Sensor Controller White balance features
- Media Controller Pipeline For Image Acquisition and SAM MPU Products
- How to patch Device Tree Blob in U-boot using Overlays
- How to use Pulse Width Modulation driver
- Using the SAMA5D2-compatible ADC device
- SD card boot for AT91SAM SoC
- Using systemd
- U-Boot FAQ
- USB Gadget Configuration
- How to use the Atmel KMS/DRM LCD driver
- Using FIT Image and Device Tree Overlays
- External Component on External Bus Interface